[Softeer] [파이썬] 로봇이 지나간 경로
[4일차] [코딩테스트] [인증평가(1차) 기출] [Python]
https://softeer.ai/practice/info.do?idx=1&eid=577
입력형식
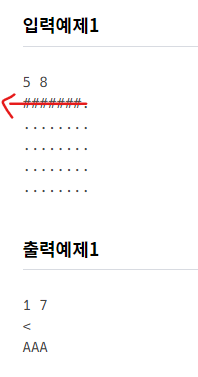
첫 번째 줄에 격자판의 세로 크기 H와 가로 크기 W가 공백 하나를 사이로 두고 주어진다. 다음에는 사수가 넘겨준 지도가 주어진다. H개의 줄에 W개의 문자가 주어지는데, 이 중 i(1 ≤ i ≤ H)번째 줄의 j(1 ≤ j ≤ W)번째 문자는, 사수가 조작한 로봇이 i행 j열을 방문했다면 ‘#’이고, 방문하지 않았다면 ‘.’이다.
출력형식
첫 번째 줄에 두 개의 정수 a(1 ≤ a ≤ H)와 b(1 ≤ b ≤ W)를 공백 하나씩을 사이로 두고 출력한다. 이는 처음 로봇을 격자판의 a행 b열에 두어야 함을 의미한다.
두 번째 줄에 ‘>’, ‘<’, ‘v’, ‘^’ (따옴표 제외) 중 하나를 출력한다. 이 문자는 처음 로봇이 바라보는 방향을 의미하며, >는 동쪽, <는 서쪽, v는 남쪽, ^는 북쪽이다.
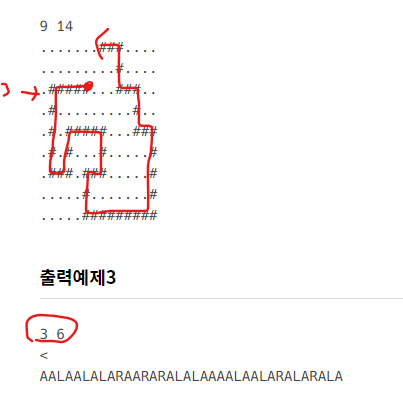
세 번째 줄에 당신이 로봇에 내려야 하는 명령어들을 공백 없이 명령을 내릴 순서대로 출력한다. 이 문자열의 길이가 곧 당신이 내리는 명령어의 개수이며, 명령어의 개수를 최소화해야 정답 처리된다.
명령어의 개수를 최소화하면서 목표를 달성할 수 있는 방법이 여러 가지라면, 그 중 한 가지를 아무거나 출력하면 된다.
처음에 문제를 볼때 이해하기 힘든데 #을 이어주면 그게 로봇이 지나간 루트이고 어디서 시작했는지를 찾으며 컨트롤 명령어순서를 찾는 문제로 지도,미래 문제와 비슷하다는 느낌이 들면서 DFS나 BFS문제로 느껴진다.
- 시작위치를 찾기 위해 격자판을 행,열로 탐색한다.
- ’#’이 시작하는 시작위치를 찾으면 BFS나 DFS로 상하좌우를 살피며 ‘#’인곳으로만 길을 간다.
- 간 길에 방향표시와 방문표시를 한다
- 2칸에 A 명령어, 방향 바뀌면 L 또는 R
🚀 나의 풀이 ⭕
import sys
from collections import deque # BFS면 deque
# 먼저 '#'을 다 잇는다
# 다 이은 최적 루트는 2가지 경우 밖에 없다.
# 그 중 한 가지를 아무거나 출력하면 된다.
# 상하좌우 조합
dx = [-1,0,1,0]
dy = [0,1,0,-1]
directions = ['^','>','v','<']
def check(x,y):
cnt = 0
for i in range(4): # 상하좌우 4개
xx=x+dx[i]
yy=y+dy[i] # 상하좌우 좌표 업데이트
# 업데이트 된 좌표가 격자판을 넘지 않으며 4방향중 다음 위치가 '#'이 있는 위치일때만
if 0<=xx<H and 0<=yy<W and maps[xx][yy]=='#':
start = directions[i] # 시작할때 어디를 보고 시작하는 지 방향 체크
cnt+=1
if cnt>1: # 꺽이는 부분이면
return False
return start
def BFS(x,y):
path = []
Q = deque()
Q.append((x,y))
visited[x][y] = True # 일단 방문 체크
while Q: # 한쪽 방향 끝날때 까지
tmp=Q.popleft() # 시작 위치 좌표 꺼내
for i in range(4): # 4방향 확인
xx=tmp[0]+dx[i] # 거기에 좌표 업데이트 값
yy=tmp[1]+dy[i]
direction=directions[i] # 그때 방향, 4방향 확인
# 격자판 안에서 '#'이면서 한번도 방문한적없으면
if 0<=xx<H and 0<=yy<W and maps[xx][yy]=='#' and visited[xx][yy]==False:
visited[xx][yy] = True # 방문 체크
path.append(direction) # 방향
Q.append((xx,yy)) # 좌표
# -> 4방향을 다 살피며
return deque(path) # '#'을 다 이어서
if __name__=="__main__":
H, W = map(int, sys.stdin.readline().split()) # 격자판 만들기
maps = [list(sys.stdin.readline().rstrip()) for _ in range(H)]
# sys.stdin = open('input.txt', 'r')
# H,W=map(int, input().split())
# maps = [list(sys.stdin.readline().rstrip()) for _ in range(H)]
visited = [[False] * W for _ in range(H)] # 방문 표 만들기
ans = []
for row in range(H):
for col in range(W): # 행, 열 탐색
if maps[row][col]=='#' and check(row,col): # '#'인 경우이자 직선방향이면
trace=BFS(row,col) # 갈 수 있는 최적의 루트가 나온다.
print(row+1, col+1) # 시작 위치
# print(trace) # 그때 방향들
print(trace[0]) # 첫 방향
# 이때 시작 위치의 로봇 방향
current = trace.popleft()
cnt = 1
# 명령어 출력을 위해
for next in trace:
if current == next:
cnt += 1
current = next
if cnt % 2 == 0: # 방향이 2개씩 되어있으면
ans.append("A") # 이동 명령어 'A'
cnt = 0
else: # 그다음 방향이 현재 방향과 일지 하지 않으면 회전인데
# 왼쪽이냐 오른쪽이냐
if directions[directions.index(current) - 1] == next:
ans.append("L")
else:
ans.append("R")
current = next # 회전수행 후 방향이 바뀐다.
cnt = 1
for i in ans:
print(i, end="")
# 찾으면 더 수행 할 필요없이 프로그램 끝내기
sys.exit(0)
🌜 개인 공부 기록용 블로그입니다. 오류나 틀린 부분이 있을 경우
언제든지 댓글 혹은 메일로 지적해주시면 감사하겠습니다! 😄